2023.05.26
PRESS
当社水中ドローンの自動航行による高精細な海底マッピングを実現しました。

当社の産業用水中ドローン「DiveUnit300」が自動航行による海底マッピングを実現しました。
この成果は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の2022年度「研究開発型スタートアップ支援事業/Product Commercialization Alliance(PCA)」の結果得られたものです。
1.研究目標
産業用水中ドローン「DiveUnit300」を用いて海底を撮影しながら自動航行を実施し海底マッピングを完成させ、世界の水中ロボティクス技術の進歩を実現し、持続可能な社会の実現に貢献してまいります。
2.今回の成果
産業用水中ドローン「DiveUnit300」に一部改造を施し、位置推定結果とカメラで撮影した動画を用いて海底マッピングを実施しました。検証実験は、海底高度1.5mで水中ドローンの自動航行を実施し、機体の位置情報とカメラで撮影した動画から1秒間隔で635枚の画像を切り出し、それらを合わせてフォトグラメトリ処理を行い海底のオルソ画像を制作し高精細な海底マッピングを実現しました。また、同時にマルチビームソナーによる検証実験も行い、海底高度2.0mで水中ドローンの自動航行を実施し、マルチビームソナーのデータと機体の位置情報を合わせて音響画像による海底マッピングも実現しました。
カメラで撮影した海底写真

©FullDepth
海底のオルソ画像

©FullDepth
マルチビームソナーによる海底画像マップ
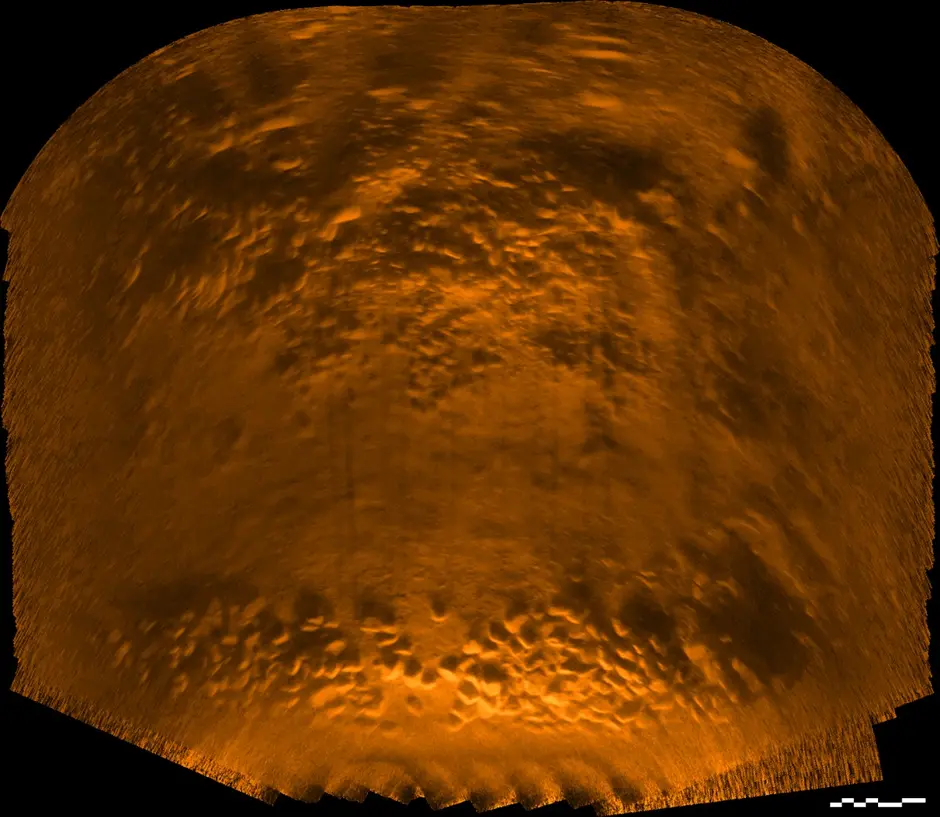
©FullDepth
3.使用機材
産業用水中ドローン DiveUnit300 / マルチビームソナー
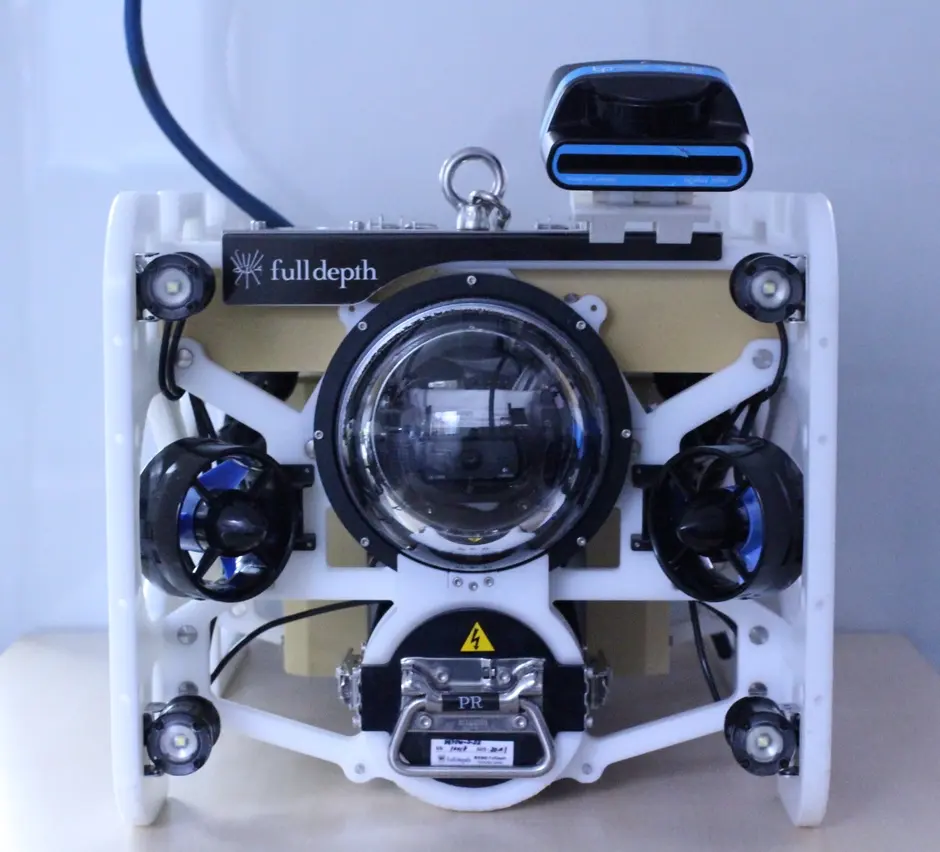
©FullDepth
DVL

©FullDepth
【メディア向け成果報告会】
《内容》
- ご挨拶
- 開発背景
- 自動航行の海底マッピング技術の概要と成果報告
- 今後の展開
- 質疑応答
- 【デモンストレーション】水中ドローン自動航行
《参加方法》
メディア向け成果報告会への参加をご希望の際は、タイトル:メディア向け成果報告会、本文:御社名 / 媒体名 / ご出席代表者名 / ご連絡先をご記入の上、6月20日(火)までに メール にてお送りください。